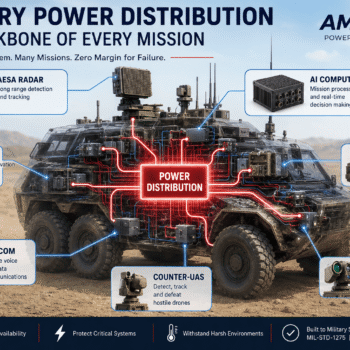
Why Military Power Distribution Is Becoming the New Battlefield
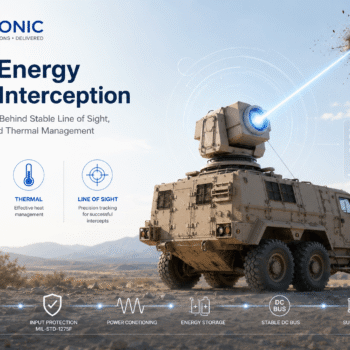
Modern military platforms rely on far more than powerful radars and advanced mission computers. Behind every mission-critical system is a power distribution architecture that must remain stable under extreme electrical and environmental conditions. This article explains why selecting the right circuit breaker involves much more than matching the current rating, and how factors such as inrush current, trip curves, thermal performance, and system design can determine whether a platform continues its mission or unexpectedly shuts down.