למה חלוקת ההספק הצבאית הופכת לשדה הקרב החדש
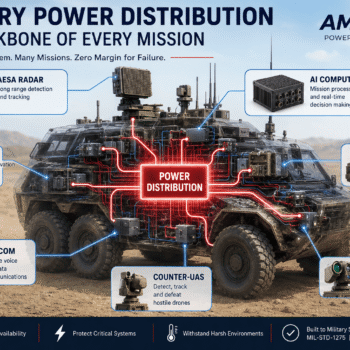
מערכות לחימה מודרניות עמוסות במכ"מים, מערכות EO/IR, מחשבי משימה, לוחמה אלקטרונית, תקשורת ולייזרים עתירי הספק. כולן נשענות על אותה תשתית אחת – מערכת חלוקת ההספק.
כאשר היא מתוכננת נכון, איש אינו מבחין בה. אך כאשר מפסק ההגנה אינו מתאים לעומס, עקומת הניתוק שגויה או זרם ההתנעה לא נלקח בחשבון, התוצאה עלולה להיות אתחול בלתי צפוי של מערכות קריטיות דווקא ברגע האמת.
במאמר זה נבחן מדוע בחירת מפסק זרם אינה מסתכמת בזרם הנומינלי בלבד, כיצד זרמי התנעה ו-Trip Curve משפיעים על אמינות המערכת, ומדוע חלוקת ההספק הפכה לאחד התחומים הקריטיים ביותר בתכנון פלטפורמות צבאיות מודרניות.