במערכות ניווט, ייצוב ותצפית מודרניות, רוב המהנדסים מתמקדים ברעש, drift ודיוק הג’יירו.
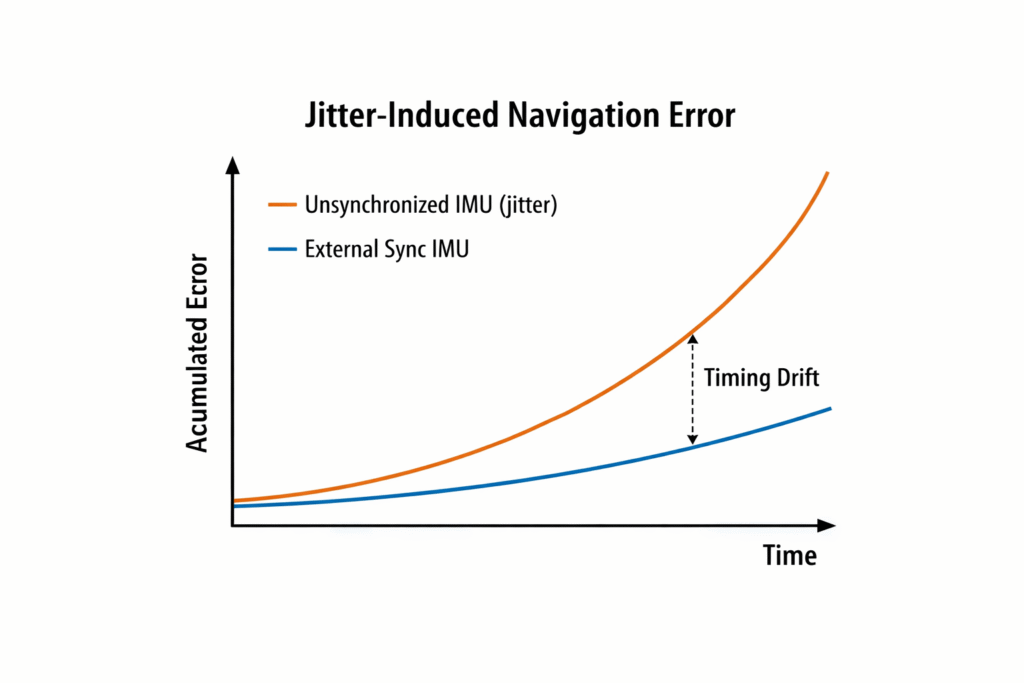
אבל בפועל, הגורם שמפיל מערכות רבות הוא שגיאת זמן.
Gyro לא מודד "זווית".
הוא מודד קצב זוויתי בזמן מאוד מסוים.
אם הזמן הזה אינו מיושר למצלמה, ל-Radar או ל-GNSS, גם הג’יירו הטוב בעולם יפיק נתונים שגויים.
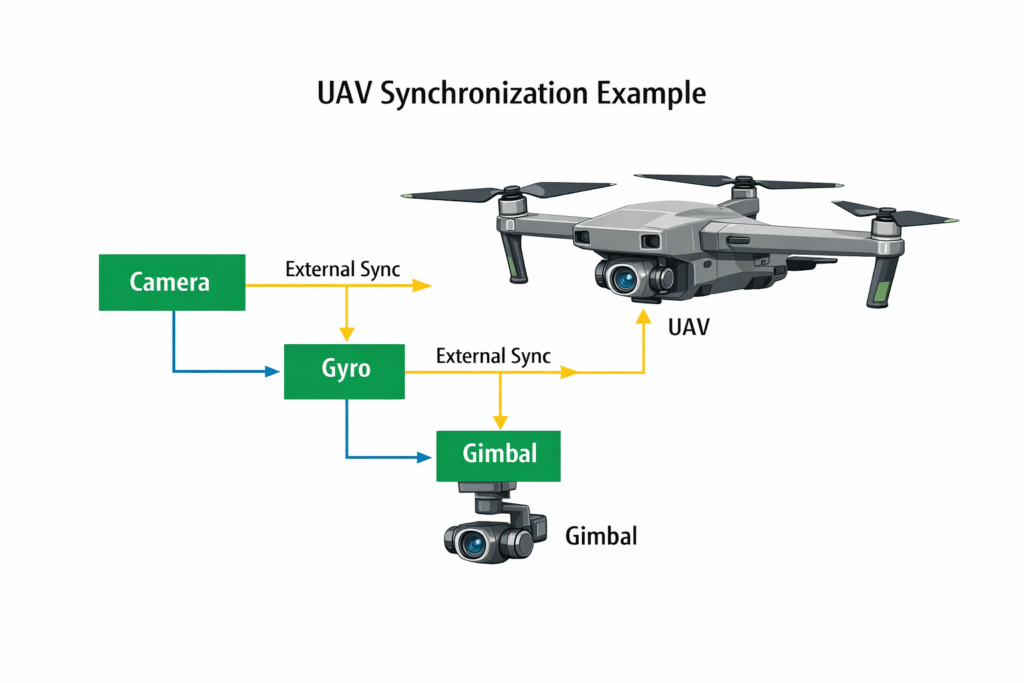
External Sync נועד לפתור בדיוק את הבעיה הזו.