רקע כללי
מערכות בקרה מתקדמות מסוימות פועלות בסביבה שבה הדינמיקה אינה אירוע חריג, אלא מצב עבודה שגרתי.
מדובר במערכות שבהן פעולה מחזורית, עומסים משתנים והלמים מכניים קצרים אך עוצמתיים הם חלק בלתי נפרד מפרופיל ההפעלה.
בסביבות כאלה, חיישני תנועה אינם משמשים רק למדידה או לייצוב איטי, אלא מהווים רכיב קריטי בלב לולאת בקרה מהירה, החייבת להישאר יציבה, מדויקת וצפויה גם תחת:
-
שוקים מכניים קצרים ובעוצמה גבוהה
-
רעידות מחזוריות בתדרים משתנים
-
פרופיל דינמי החוזר על עצמו שוב ושוב לאורך חיי המערכת
ביישומים מסוג זה, ההבחנה הקלאסית בין IMU לבקרה לבין IMU לניווט מתחילה להיטשטש.
האתגר ההנדסי
במערכות מחזוריות עתירות דינמיקה, ה-IMU נדרש לתמוך ברצף פעולה הכולל:
-
שלבי שקט יחסיים
-
אירועי הלם קצרים אך אנרגטיים
-
חזרה מהירה ליציבות מלאה
-
שמירה על דיוק זוויתי מצטבר לאורך זמן
האתגרים המרכזיים בסביבה כזו כוללים:
-
מניעת saturation רגעי של ה-Gyro
-
חזרה מהירה לערכי bias יציבים לאחר אירוע הלם
-
שמירה על phase margin מספק בלולאת הבקרה
-
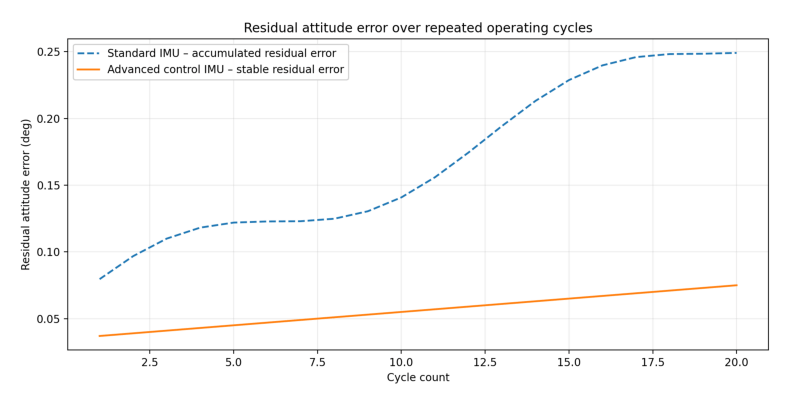
מניעת הצטברות שגיאה לאורך מחזורים רבים
IMU קלאסי לבקרה מתקשה להתמודד עם הצטברות שגיאות ארוכת טווח תחת פעולה מחזורית.
IMU ניווט קלאסי, לעומת זאת, אינו תמיד מותאם ל-dynamics האגרסיביים ול-latency הנדרש בלולאות בקרה מהירות.
למה IMU “רגיל” נכשל בסביבה כזו
במערכות מסוג זה, שימוש ב-IMU סטנדרטי מוביל לרוב לתופעות מוכרות:
-
drift מצטבר לאחר כל אירוע הלם
-
הגדלת סינון כדי “לנקות” רעש, במחיר של latency
-
ירידה ביציבות הלולאה תחת פעולה מחזורית
-
שונות גבוהה בין מחזור למחזור
כל אחת מהתופעות האלו לבדה עשויה להיות נסבלת.
בשילוב, הן יוצרות מערכת שקשה מאוד לשלוט בה לאורך זמן, במיוחד כאשר הדרישה אינה רק לייצוב רגעי, אלא לדיוק מצטבר ועקביות מחזורית.
ארכיטקטורה לבקרה מתקדמת – דוגמה מעשית
אחת הדוגמאות לארכיטקטורה שתוכננה מראש לעולם הזה היא Landmark005 IMU עם Velox Plus.
מדובר ב-IMU לבקרה מתקדמת, עם מאפיינים שמקרבים אותו לעולם הניווט – מבלי להפוך ל-IMU ניווט “כבד”.
מרכיבי המפתח בארכיטקטורה זו כוללים:
-
Gyro מבוסס SX2 עם יציבות תרמית ודינמית גבוהה
-
Accelerometers בעלי רעש נמוך והתנהגות צפויה לאחר הלם
-
ארכיטקטורת Velox Plus לדגימה, תזמון ו-alignment
Velox Plus אינו מתמקד רק בקצב דגימה גבוה, אלא מספק:
-
תזמון עקבי ומדויק בין gyro ל-accel
-
latency נמוך ויציב
-
היעדר jitter בין מחזורים
-
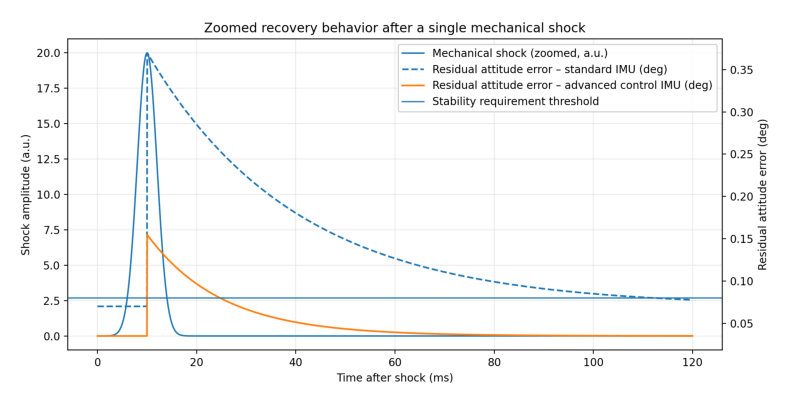
חזרה מהירה למצב steady-state לאחר אירוע דינמי
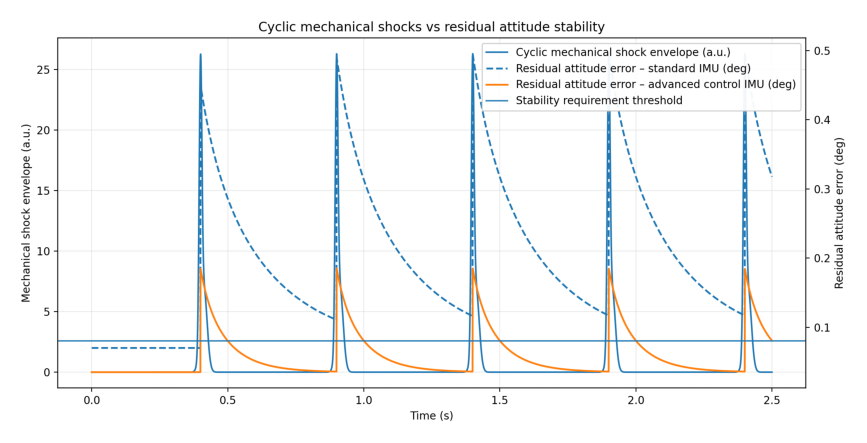
התנהגות מערכתית תחת פעולה מחזורית
בבחינה מערכתית תחת פרופיל פעולה מחזורי הכולל הלמים חוזרים, ניתן להבחין בהתנהגות שונה באופן מהותי:
לאחר אירוע הלם
-
חזרה מהירה לערכי bias יציבים
-
ללא צורך ב-reset או recalibration
-
ללא drift מצטבר בין מחזורים
בלולאת הבקרה
-
שמירה על phase margin גם בתדרים גבוהים
-
תגובה עקבית בין מחזור למחזור
-
ירידה משמעותית ב-jitter זוויתי
לאורך זמן
-
יציבות זוויתית מצטברת
-
יכולת לשמש כ-reference גם בין מחזורים
-
מעבר טבעי מ-control behavior ל-navigation aiding